
Funktionsweise
Moderne Geschwindigkeitsüberwachung erfolgt mit weitgehend automatisierten Systemen, die den Messposten beim eigentlichen Messvorgang überflüssig machen. Er richtet die Anlage nur noch ein und überwacht den Ablauf. Nicht zuletzt deshalb erfreut sich das Geschwindigkeitsmesssystem „PoliScan-Speed“ der Firma Vitronic großer Beliebtheit. Aufgrund des sehr komplexen Aufbaus wird der Funktionsweise ein umfangreicher Beitrag gewidmet.
Bei diesem System wird die Messeinheit neben der Straße aufgestellt. Die Messeinheit enthält das eigentliche Messsystem „Lidar“, zwei hochauflösende Digitalkameras, den Auswerterechner und eine LCD-Anzeige an der Rückseite. Weiterhin ist ein externer Rotlichtblitz zur Aufhellung im Moment der Bilddokumentation des Verstoßes angeschlossen. Die Messeinheit und der Blitz werden in der mobilen Variante über zwei voneinander unabhängige 12 V-Akkumulatoren betrieben.
Das Foto zeigt ein solches Messsystem mit dem separaten Blitz. Oben auf dem Gehäuse sind unter einem abnehmbaren Schutzdeckel zwei Kameras sowie ein Zielfernrohr montiert. Die Kameras sind mit Siegelmarken versehen, um eine Dejustage ggf. zu dokumentieren.

LIDAR steht dabei für „Light Detection And Ranging, also Lichtempfang und Entfernungsbestimmung. Die Geschwindigkeitsmessung beruht auf einer Laserpuls-Laufzeitmessung.
Vom Messkopf wird ein kurzer Laserpuls ausgesendet. Der Strahl wird nach der Reflektion an einem Objektpunkt vom Empfänger der Messeinheit detektiert und ausgewertet. Aus der Signallaufzeit vom Sender zum Objektpunkt und wieder zurück berechnet sich die Distanz zwischen Messkopf und dem Bereich, an dem der Messstrahl aufgetroffen ist. Beim System PoliScan-Speed wird ein scannendes Lidar eingesetzt, d.h. der Laserstrahl wird über einen rotierenden Spiegel zu definierten Zeitpunkten in definierte Richtungen gelenkt. Durch eine Aussendung von insgesamt 158 einzelnen Messstrahlen nacheinander in gleichen definierten Winkelabständen wird ein Bereich von 45° vor dem Messgerät nacheinander abgetastet (engl. scannen). Über die Laufzeiten des reflektierten Lichts lässt sich die Entfernung aller angemessenen Bereiche vom Messkopf zum jeweiligen Zeitpunkt berechnen.
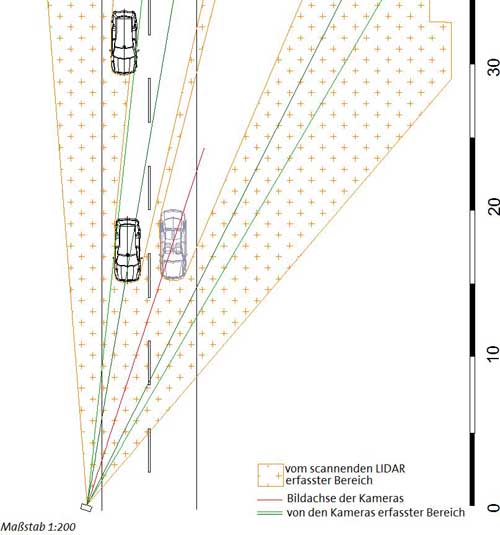
Die Prinzipskizze verdeutlicht den Scanbereich. Vom Lidar wird der Bereich vor dem Messgerät in einer Entfernung zwischen rund 10 und 75 m abgetastet. Der Messstrahl reicht also noch weiter als in der Skizze angedeutet. Der eigentliche Messbereich liegt zwischen 20 und 50 m vor dem Messgerät.
Das Gerät scannt den gesamten 45°-Bereich 100-mal in der Sekunde ab. Die Distanz zwischen Messgerät und ortsfesten Punkten bleibt konstant. Dahingegen verändert sich die Distanz zwischen einem bewegten angestrahlten Bereich und dem Messgerät mit der Zeit, wenn sich das Objekt bewegt. Durch die Scanrate von 100 Hz wird der Bereich vor dem Sensor 100-mal in der Sekunde erfasst. Die eingebaute Software wertet die gewonnenen einzelnen Entfernungsmessdaten aus.
Geschwindigkeitsmessung bedeutet bei diesem Gerät also das Verfolgen eines Objektes mittels der geräteinternen Software in der Summe der gewonnenen Messpunkte. Aus der zeitaufgelösten Verfolgung (engl. tracking) ergibt sich die momentane Bewegungsgeschwindigkeit des Objektes. Wenn die Geschwindigkeit über dem eingestellten Grenzwert liegt und eine gewisse Kontinuität und Gleichmäßigkeit in der Bewegungsgeschwindigkeit festgestellt wird, so beurteilt die geräteinterne Software die Auswertung als eine gültige Messung. Die Auswertelogik kann dabei bis zu drei Fahrstreifen nebeneinander und auch mehrere hintereinander auf einem Fahrstreifen fahrende Fahrzeuge gleichzeitig verarbeiten.