
Belastung im Autoscooter
Vorab stellt sich die Frage, ob sich die Belastung der HWS bei Zusammenstößen im Autoscooter mit derjenigen bei Pkw-Pkw-Kollisionen vergleichen läßt. Zur Beantwortung dieser Frage wollen wir uns zunächst mit dem konstruktiven Aufbau dieser Fahrzeuge beschäftigen.
Auf dem linken Foto ist der Aufbau eines Autoscooters in der Ansicht von unten vorgestellt. Der Scooter verfügt über drei Räder, zwei auf einer starren Hinterachse und ein um die vertikale Achse drehbares Vorderrad. Der Antrieb erfolgt über das Vorderrad, das unmittelbar auf dem Anker des Gleichstrommotors aufgebracht ist. Der Gleichstrommotor wird über einen Bügel aus der «Oberleitung» mit Spannung versorgt; die in der Mitte des Fahrzeugs angebrachte Drahtbürste sorgt für den Kontakt mit der stählernen Bodenplatte der Fahrbahn. Das Gaspedal besteht aus einem einfachen Schalter, der bei Betätigung die volle Spannung auf den Gleichstrommotor gibt. Die Fahrgeschwindigkeit ist durch den Fahrer selbst somit allenfalls durch Betätigen des Gaspedals regelbar, ansonsten bewegt sich der Scooter mit Maximalgeschwindigkeit. Die Fahrgeschwindigkeit ist nur für sämtliche Scooter gemeinsam über die vom Betreiber regelbare Versorgungsspannung einstellbar. Die Versorgungsspannung liegt im Bereich von 90 bis 120 Volt. Gemäß unseren Messungen erreichen die Scooter, je nach eingestellter Spannung, Maximalgeschwindigkeiten von 10 bis 15 km/h. Um den Anprall bei Zusammenstößen zu dämpfen und die Scooter vor Beschädigungen zu schützen, sind sie mit einem luftgefüllten Schlauch umgeben, der über ein normales Reifenventil mit Druck beaufschlagt wird.

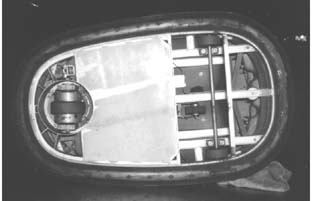
Das rechte Foto zeigt weiter einen mit Messtechnik ausgestatteten Versuchs-Scooter während einer Messfahrt. Die Lichtbilder lassen die Sitzkonstruktion gut erkennen. Der Sitz besteht aus einer in die metallene Karosserie eingelassenen Kunststoff-Halbschale, die den Rücken eines Erwachsenen etwa bis in Schulterblatthöhe abstützt. Insbesondere die rückwärtige Bewegung des Kopfes ist ungehindert möglich.
Für die Messfahrten wurde ein Scooter, für Außenstehende möglichst unauffällig, mit einer Messwerterfassungseinrichtung ausgestattet. Mit dem solchermaßen präparierten Autoscooter nahmen Probanden am üblichen Fahrbetrieb teil. Die Messwerterfassungseinrichtung verfügte, ähnlich wie ein Unfalldatenspeicher (UDS), über zwei Beschleunigungsaufnehmer, die Längs- und Querbeschleunigung des Fahrzeugs erfassten. Ähnlich wie im Unfalldatenspeicher war auch in dem von uns entworfenen Messwerterfassungsprogramm eine Triggerbedingung implementiert, die Kollisionsereignisse automatisch erkannte und die Beschleunigungsdaten festhielt. Die Beschleunigungseinwirkungen auf die «Fahrgastzelle» des Autoscooters wurden also während einer Kollision messtechnisch erfasst. Um kein Aufsehen zu erregen (und damit möglicherweise eine ungewollte Schonung unseres Scooters durch die anderen Fahrgäste hervorzurufen), wurde auf eine messtechnische Erfassung der Insassenbewegung verzichtet.
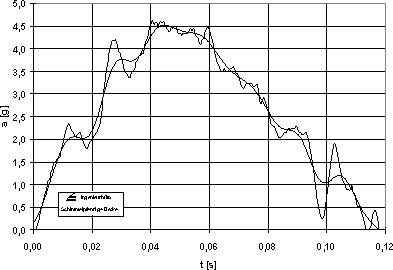
Im Anschluss an die Testfahrten standen etwa siebzig Kollisionsereignisse für die Auswertung zur Verfügung. Folgende Abbildung zeigt exemplarisch einen typischen Beschleunigungsmessschrieb. Die im Vergleich zum Pkw äußerst starre Karosserie sowie das definierte Verformungsverhalten des luftgefüllten Prallrings bilden eine ausgezeichnete Voraussetzung für die messtechnische Erfassung der Beschleunigungssignale. Die Gesamtauswertung der Messungen hat gezeigt, dass die Stoßzeit unabhängig von der Anstoßgeschwindigkeit ist. Die Stoßzeiten sämtlicher Einzelkollisionen liegen in einem Bereich von 0,075s bis 0,15s. In der Mehrzahl gruppieren sich die Messungen sehr dicht um die mittlere Stoßzeit von einer Zehntelsekunde.
 Die Anstoßgeschwindigkeit wurde messtechnisch nicht erfasst. Theoretisch ergibt sich die maximale Differenzgeschwindigkeit der Fahrzeuge für den Fall, dass zwei Fahrzeuge mit voller Fahrgeschwindigkeit und gegenläufigen Fahrtrichtungen aufeinanderprallen. Je nach eingestelltem Fahrtempo der Scooter liegen diese Werte immerhin zwischen 20 km/h und 30 km/h. Tatsächlich tritt dieser Fall in der Praxis seltener ein, da die Fahrzeuge gegen den Uhrzeigersinn fahren und eine Bewegung gegen die allgemeine Fahrtrichtung vom Betreiber möglichst unterbunden wird. Die maximalen Anstoßgeschwindigkeiten ergeben sich nach unserer Erfahrung beim Anstoß an ein stehendes Fahrzeug, sodass die maximale Anstoß-Differenzgeschwindigkeit mit der durch den Betreiber eingestellten maximalen Fahrgeschwindigkeit identisch ist. Diese war während der Mehrzahl der von uns angestellten Versuche an der Untergrenze von 10 km/h eingestellt; eine kleinere Anzahl von Versuchen wurde auch auf höherer Fahrstufe vorgenommen. Wie nicht anders zu erwarten, sind Scooter-Kollisionen nahezu vollelastisch (Stoßfaktor k=1). Die Geschwindigkeitsänderung reicht deshalb bis in den Bereich der maximalen Anstoßgeschwindigkeit. Wie die im Rahmen unserer Untersuchung durchgeführten Fahrzeug-Fahrzeug-Kollisionen zeigen, beträgt die Geschwindigkeitsänderung in diesen Fällen maximal knapp 70 % der Stoßdifferenzgeschwindigkeit (Stoßfaktor k = 0,4). Um die maximale Anstoßgeschwindigkeit der Autoscooter auf die äquivalente Anstoßgeschwindigkeit einer Pkw-Pkw-Kollision umzurechnen, muss also etwa mit dem Faktor 1,5 multipliziert werden. Bei einer Fahrstufe von 10 km/h entspricht dies einer Anstoßgeschwindigkeit von 15 km/h im Pkw, bei einer Fahrstufe von 15 km/h immerhin bereits knapp 23 km/h.
Die Anstoßgeschwindigkeit wurde messtechnisch nicht erfasst. Theoretisch ergibt sich die maximale Differenzgeschwindigkeit der Fahrzeuge für den Fall, dass zwei Fahrzeuge mit voller Fahrgeschwindigkeit und gegenläufigen Fahrtrichtungen aufeinanderprallen. Je nach eingestelltem Fahrtempo der Scooter liegen diese Werte immerhin zwischen 20 km/h und 30 km/h. Tatsächlich tritt dieser Fall in der Praxis seltener ein, da die Fahrzeuge gegen den Uhrzeigersinn fahren und eine Bewegung gegen die allgemeine Fahrtrichtung vom Betreiber möglichst unterbunden wird. Die maximalen Anstoßgeschwindigkeiten ergeben sich nach unserer Erfahrung beim Anstoß an ein stehendes Fahrzeug, sodass die maximale Anstoß-Differenzgeschwindigkeit mit der durch den Betreiber eingestellten maximalen Fahrgeschwindigkeit identisch ist. Diese war während der Mehrzahl der von uns angestellten Versuche an der Untergrenze von 10 km/h eingestellt; eine kleinere Anzahl von Versuchen wurde auch auf höherer Fahrstufe vorgenommen. Wie nicht anders zu erwarten, sind Scooter-Kollisionen nahezu vollelastisch (Stoßfaktor k=1). Die Geschwindigkeitsänderung reicht deshalb bis in den Bereich der maximalen Anstoßgeschwindigkeit. Wie die im Rahmen unserer Untersuchung durchgeführten Fahrzeug-Fahrzeug-Kollisionen zeigen, beträgt die Geschwindigkeitsänderung in diesen Fällen maximal knapp 70 % der Stoßdifferenzgeschwindigkeit (Stoßfaktor k = 0,4). Um die maximale Anstoßgeschwindigkeit der Autoscooter auf die äquivalente Anstoßgeschwindigkeit einer Pkw-Pkw-Kollision umzurechnen, muss also etwa mit dem Faktor 1,5 multipliziert werden. Bei einer Fahrstufe von 10 km/h entspricht dies einer Anstoßgeschwindigkeit von 15 km/h im Pkw, bei einer Fahrstufe von 15 km/h immerhin bereits knapp 23 km/h.
Bereits die Höhe dieser äquivalenten Anstoßgeschwindigkeiten lässt eine Vergleichbarkeit der HWS-Belastungen bei Kollisionen von Scootern bzw. Pkw erwarten. Da der Kopf des Insassen im Autoscooter beim Heckanstoß nicht durch eine Kopfstütze sofort mitbeschleunigt wird, ist sogar davon auszugehen, dass die Belastung der HWS bei gleicher Anstoßintensität im Autoscooter viel höher ist als im Pkw.